vektorový součin
- $\vec{u}\times\vec{v}=(u_2v_3-u_3v_2,u_3v_1-u_1v_3,u_1v_2-u_2v_1)$
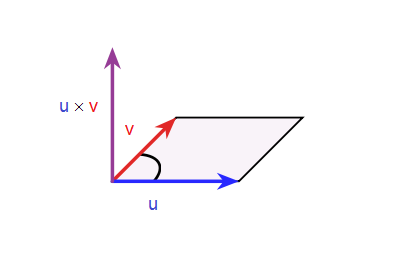
- $\|\vec{u}\times\vec{v}\|=$ obsah rovnoběžníka $\vec{u},\vec{v}$
smíšený součin
- $\vec{u}\cdot(\vec{v}\times\vec{w})=\text{det}(\vec{u},\vec{v},\vec{w})$
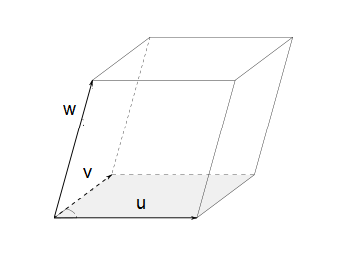
- $\vec{u}\cdot(\vec{v}\times\vec{w})=$ objem rovnoběžnostěnu $\vec{u}, \vec{v}, \vec{w}$
Bod $\times$ přímka
Využitím lineární závislosti vektorů

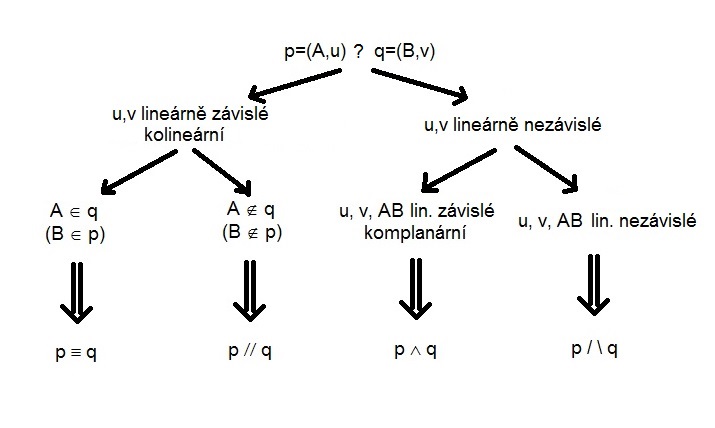
přímka $\times$ přímka
Využitím lineární závislosti vektorů
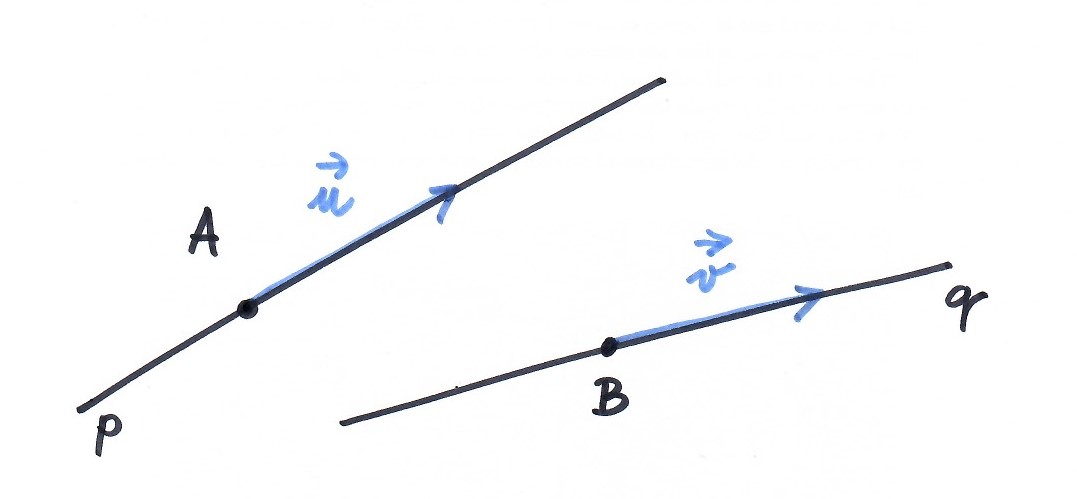
přímka $\times$ přímka
Využitím lineární závislosti vektorů

přímka $\times$ přímka
Využitím lineární závislosti vektorů
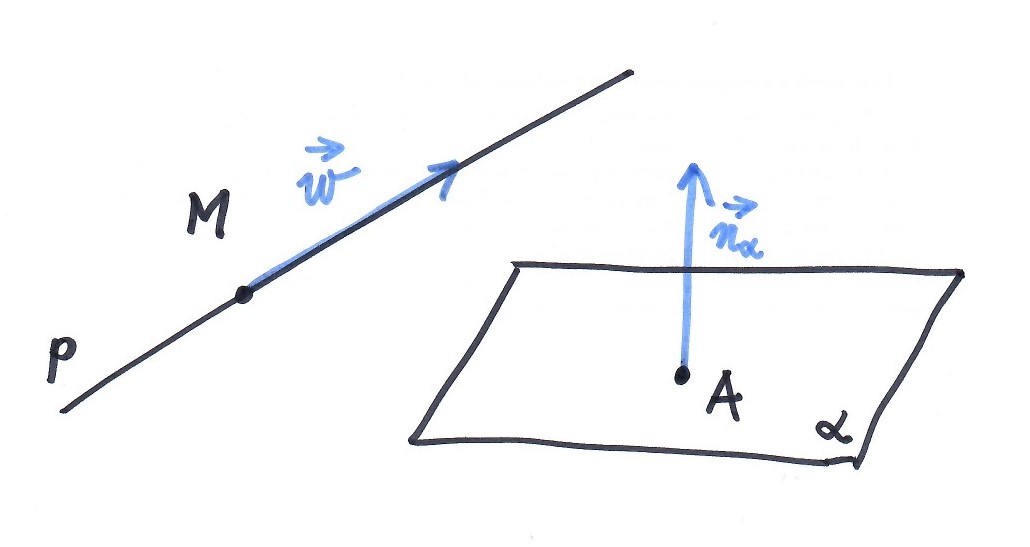
přímka $\times$ rovina
Využitím vztahu kolmosti dvou vektorů
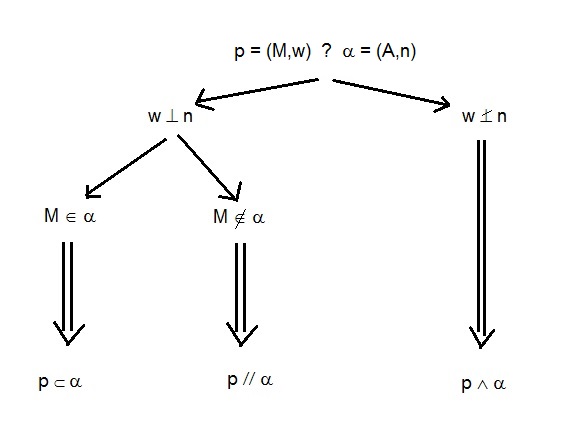
přímka $\times$ rovina
Využitím vztahu kolmosti/lin. závislosti vektorů
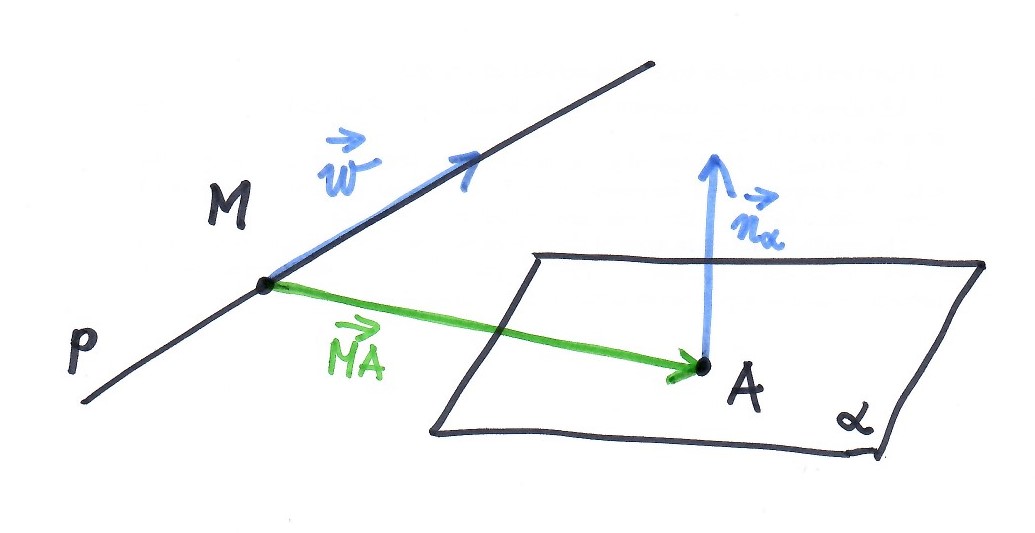
přímka $\times$ rovina
Využitím vztahu kolmosti/lin. závislosti vektorů
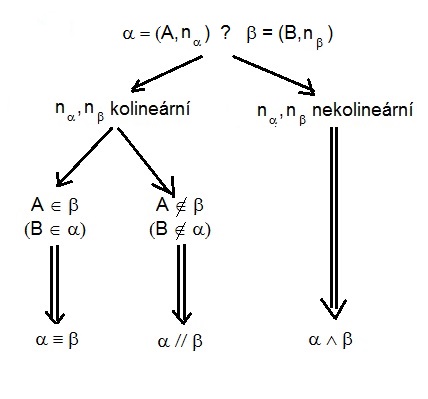
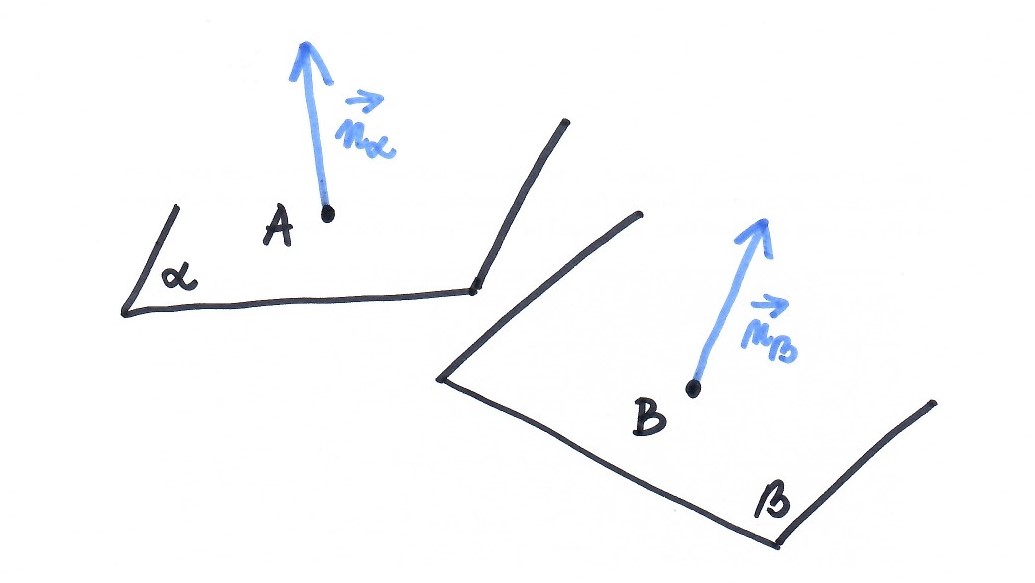
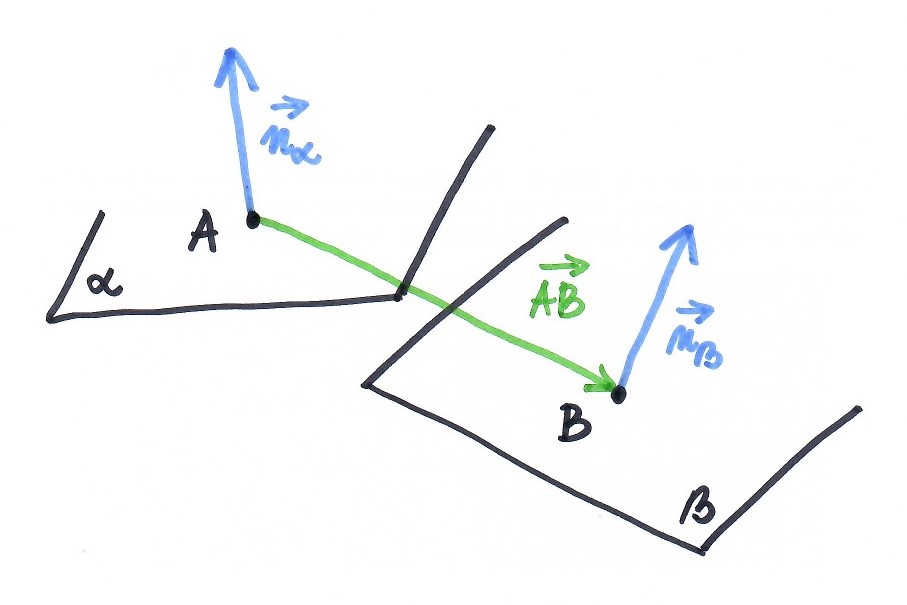
rovina $\times$ rovina
Využitím lineární závislosti vektorů
rovina $\times$ rovina
Využitím lineární závislosti vektorů
rovina $\times$ rovina
Využitím lineární závislosti vektorů